Los robots quirúrgicos y su impacto en la medicina moderna

En los últimos años, ha existido una creciente cantidad de robots diseñados para intervenciones quirúrgicas. La precisión, en comparación con las técnicas tradicionales, ha convertido a los robots en herramientas valiosas para los cirujanos. Los robots quirúrgicos, como el sistema da Vinci, han demostrado su eficacia en una variedad de procedimientos, desde cirugías cardíacas hasta prostatectomías. Además, la cirugía robótica ha permitido a los cirujanos superar las limitaciones de la cirugía laparoscópica, al proporcionar una mayor destreza y visión tridimensional.
Desarrollo Histórico
En la década de 1980 se desarrolló el primer sistema robótico, llamado Arthrobot, que se utilizó para asistir durante una intervención quirúrgica a un paciente en Canadá[1]. Arthrobot fue diseñado para ayudar en la manipulación y posicionamiento de las piernas de los pacientes mediante comandos de voz. Al mismo tiempo, en esta década, un robot industrial llamado PUMA 560 se empleaba para realizar biopsias cerebrales utilizando tomografía computarizada (CT)[2].

En la década de 1990, el Imperial College London desarrolló ProBot, un robot para la resección transuretral de la próstata[3]. Durante este período, también se desarrolló ROBODOC, un prototipo de robot ortopédico creado por IBM con el fin de realizar fresado de alta velocidad y ayudar en el posicionamiento de implantes mediante el uso de la CT[3]. En 1996, se introdujo ZEUS, un sistema robótico de 6 grados de libertad (DOF), que consistía en el sistema AESOP y dos instrumentos laparoscópicos[3].
Estos avances tecnológicos han permitido mejoras en la robótica actual, lo que ha llevado a los ingenieros a contribuir con robots quirúrgicos compactos y eficaces, centrándose en los sistemas hápticos y la visión 3D. Las mejoras en las tecnologías sensoriales han contribuido al avance de la robótica médica, proporcionando una herramienta óptima de conexión entre la robótica y el ser humano. En 2012, solo el 1,8% de las cirugías generales se realizaron utilizando cirugía robótica como parte del total de cirugías, mientras que para el año 2020, esta cifra aumentó a más del 15%. Se proyecta que el mercado de la cirugía robótica alcance los 19 mil millones de dólares para 2027[4].
Clasificación y Autonomía
Los sistemas quirúrgicos robóticos se clasifican según su diseño técnico y nivel de autonomía (LoA, por sus siglas en inglés). En la actualidad, los robots quirúrgicos son principalmente teleoperados, lo que significa que un cirujano controla cada movimiento del robot.
Haidegger propuso una escala de nivel de autonomía de 0 a 5 para clasificar la robótica quirúrgica[5], donde “LoA 0” representa la ausencia de cualquier característica robótica y “LoA 5” como totalmente autónomo, un sistema sin participación humana, actualmente inexistente.
Entre ambos extremos, “LoA 1” representa un sistema que realiza una función de bajo nivel, como la ejecución de protocolos de seguridad de bajo nivel, “LoA 2” permite que el sistema realice una tarea específica de manera autónoma durante un corto período de tiempo, como realizar fresado óseo bajo la guía de imágenes, “LoA 3” sería un sistema donde una parte importante del procedimiento se ejecuta, incluida la toma de ciertas decisiones cognitivas de bajo nivel mientras trabaja ampliamente bajo supervisión humana, y “LoA 4” representaría un sistema altamente autónomo con todo el procedimiento ejecutado por el sistema, con solo el control de detención de emergencia por parte del humano.
En esencia, estas clasificaciones son extremadamente útiles y ayudan tanto a los desarrolladores como a los cirujanos a trabajar juntos desde la etapa de concepto hasta el producto final en el proceso de diseño y desarrollo de un sistema quirúrgico robótico.
Tecnologías Avanzadas
Los avances tecnológicos han impulsado la evolución de la cirugía asistida por robots. Los sistemas de visualización 3D permiten a los cirujanos sumergirse en el campo quirúrgico con una visión detallada. Los brazos robóticos, controlados por cirujanos expertos, ofrecen una precisión excepcional al realizar suturas y manipular tejidos delicados. Además, la integración de imágenes preoperatorias y la navegación guiada por imágenes han mejorado la planificación y la ejecución de procedimientos complejos.
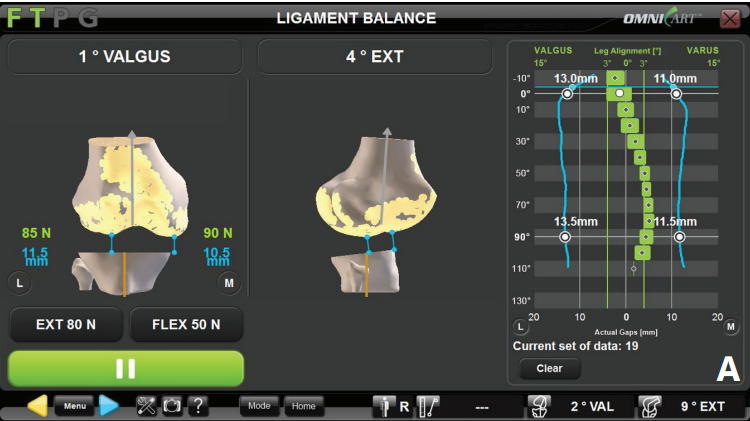
Uno de estos sistemas avanzado es Omnibotics, desarrollado por Corin[6], el cual es un sistema robótico que consiste en una estación de trabajo, una guía de corte OMNIBot y un equilibrador de ligamentos robótico llamado BalanceBot. Antes de comenzar el procedimiento quirúrgico, el cirujano verifica el rango de movimiento al colocar varios sensores que son rastreados en la estación de trabajo. El BalanceBot permite al cirujano medir la tensión en el tejido blando para planificar mejor la colocación del implante.
El sistema cuenta con tecnología de morfología ósea sin imágenes que ayuda a construir una representación 3D de la articulación. Con base en esta información, la computadora calcula el tamaño y la alineación del implante. Una vez que el plan está listo, el cirujano realiza la resección ósea utilizando la guía de corte robótica OMNIBot, que se alinea automáticamente, después de lo cual se remodela la tibia. Una vez que todos los huesos están preparados, se posicionan los implantes. Después de completar el procedimiento, el cirujano utiliza nuevamente el BalanceBot para medir el equilibrio de los ligamentos y verificar si la articulación está estable o no.
da Vinci: Cirugía del mañana hoy
Da Vinci, un sistema avanzado desarrollado por Intuitive Surgical[7], el cual posee tres versiones, da Vinci Xi, da Vinci X y da Vinci SP, que consisten fundamentalmente en una consola para el cirujano, un carro para el paciente y un carro de visión.
Un cirujano, sentado en la consola, controla los instrumentos y la cámara que están instalados en el carro del paciente a través de brazos robóticos. Esta consola también proporciona una vista tridimensional de alta definición de la anatomía. El carro del paciente se encuentra junto a la cama de operaciones, mientras que el carro de visión permite la comunicación entre todos los componentes del sistema. Las aplicaciones clínicas del sistema incluyen cirugías cardíacas, colorrectales, generales, ginecológicas, de cabeza y cuello, y torácicas, mientras que el da Vinci SP está especialmente diseñado para cirugías de acceso por un solo puerto.
Desde su aprobación por la Administración de Alimentos y Medicamentos de los Estados Unidos (FDA), siendo uno de los primeros sistemas en hacerlo, se han realizado millones de procedimientos utilizando el sistema da Vinci.

Beneficios, Futuro y Ética
Los beneficios de la cirugía robótica son evidentes, las incisiones más pequeñas reducen el dolor postoperatorio y aceleran la recuperación. Además, la menor pérdida de sangre y la precisión en la sutura mejoran los resultados quirúrgicos. Sin embargo, enfrentamos desafíos, tales como la curva de aprendizaje para los cirujanos y el alto costo de implementación. La formación adecuada es esencial para maximizar los beneficios y minimizar los riesgos.
El futuro de la cirugía asistida por robots es emocionante. Se espera que la inteligencia artificial desempeñe un papel aún más importante en la toma de decisiones durante las cirugías. Sin embargo, esto plantea cuestiones éticas, como la responsabilidad en caso de errores. Los investigadores y profesionales deben abordar estos dilemas para garantizar un uso seguro y efectivo de la tecnología.
La cirugía asistida por robots ha llegado para quedarse. A medida que la tecnología avanza, es fundamental seguir investigando y abordando los desafíos para mejorar la atención médica y la calidad de vida de los pacientes. Los cirujanos, ingenieros y científicos colaboran para llevar la cirugía robótica a nuevas alturas, beneficiando a la humanidad. Se espera que la próxima década traiga consigo avances aún más emocionantes en este campo, y la colaboración interdisciplinaria será clave para su desarrollo.
Referencias
- Blanco, J. M. (2017, 16 junio). Así era Arthrobot, el abuelo de los robots cirujanos que se perdió en una mudanza. elDiario.es. https://www.eldiario.es/hojaderouter/tecnologia/arthrobot-geof-auchinleck-robot-cirujano-brian-day-james-mcewen-canada_1_3339049.html
- Américas, D. L. (2013, 21 noviembre). El robot toma el quirófano. diariolasamericas.com. https://www.diariolasamericas.com/el-robot-toma-el-quirofano-n2897602
- R. Valero, Y.H. Ko, S. Chauhan, O. Schatloff, A. Sivaraman, & R.F. Coelho. (2011). Cirugía robótica: Historia e impacto en la enseñanza. Elsevier España, 35(9), https://www.sciencedirect.com/science/article/abs/pii/S0210480611001902?via%3Dihub. https://doi.org/10.1016/j.acuro.2011.04.005
- Fortune Business Insights. (2024, abril). Robotic Surgical Procedures Market Size, Share & Growth | Report, 2030. https://www.fortunebusinessinsights.com/industry-reports/robotic-surgical-procedures-market-100124
- Nagy, T. D., & Haidegger, T. (2020). Autonomous Surgical Robotics at Task and Subtask Levels. https://doi.org/10.4018/978-1-7998-1382-8.ch011
- Corin Group. (2018). OMNIBotics Clinical Summary. https://www.mba.eu/wp-content/uploads/2021/10/MC-043_REV_2018_OMNIBotics_Clinical_Summary.pdf
- Intuitive. (2019, marzo). About da Vinci Systems. https://www.intuitive.com/en-us/patients/da-vinci-robotic-surgery/about-the-systems
Fotografía: Cortesía de Navy Medicine Vía Flickr
Christian actualmente estudia la carrera de ingeniería mecánica en el Tec de Monterrey, campus Toluca. Participa en trabajos de diseño y construcción de vehículos, análisis de estructuras, entre otros.
Artículos más recientes

Augusto Sola: Piedra Angular en la Neonatología Latinoamericana
10/Nov/2025

La Última Lección de Julieta Fierro: Ciencia, Retos y la Felicidad Perpetua
10/Nov/2025

Aldo Bartra: detrás del Robot de Platón
07/Nov/2025

Antonio Lazcano: Precusor en la teoría del origen de la vida
07/Nov/2025

El resurgimiento de los Dinosaurios
27/Sep/2024

Expedición a los parques: bitácora de un explorador
25/Sep/2024

Ingeniería genética en los alimentos
23/Sep/2024